Kòm yon pati enpotan de lane a nan vil la, nou te deja bay anpil stokti lojikal, kote Z-fòm se pi popilè a. Nou te adopte metòd poinyon anliy, poinyon LOGO ak kouti anseye, ki te satisfè anpil bezwen kliyan yo.

Eske gen pwoblem? S il te pli kontak n pou sèvi ou!
Kòm yon pati enpotan de lane a nan vil la, nou te deja bay anpil stokti lojikal, kote Z-fòm se pi popilè a. Nou te adopte metòd poinyon anliy, poinyon LOGO ak kouti anseye, ki te satisfè anpil bezwen kliyan yo.

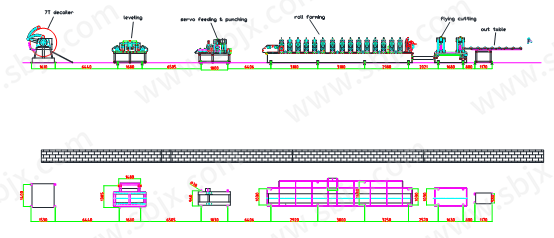
Barriyè roudad se youn nan eleman prensipal barriyè aksidan roudad la, epi epesèt fòmasyon an kapab atenn 4,5 mm. Machin nan adopte sèvo pou alimenasyon ak poinçonnaj ak tan coupant pou fè vitès la rapid, vitès liy total la kapab atenn 6-7 m/min. Liy total la adopte marke moto yo konn ak variator (VFD) kalite. Sou baze demann kliyan an, machin nan kapab tou fè yon desen modilay avèk pwofil kanal pou pozisyon an pou konsève kou manke kliyan an.
Tèknoloji major
Debobbine pou machin ak chariot
Sistèm nivo endepandant
Alimenasyon ak poinçonnaj Serco pou fè trou ak logoyos
Atravè desen modilay la pou fè pwofil diferan
Bokyè engrèj ak antren pandan koup madik
Koup transpitant vitès eleve
Spesifikasyon major linye a:
Pwiyans total liy la: aproksimativman 90KW
Vitès total liy la: 6-7 m/min
Estasyon fòmasyon an: aproksimativman 15 estasyon
Antrene pa bòsh transmisyon chak estasyon an
Pwop lan gen aprè 25 Tonn
Materyo a de roule: D2
Materyo pou poinch ak materyo pou kout D2
Mote: Siemens
Sistèm sèvo ak kontwòl: Siemens/ Mitsubishi
Pwop lan itilize kontrolè movman (MC4N-ECAT P901) ak yon sistèm telekominikasyon
Pwen pou referans: